相机成像原理
针孔模型的成像原理
相机的成像原理可以借助下图所示的针孔模型来加以解释:
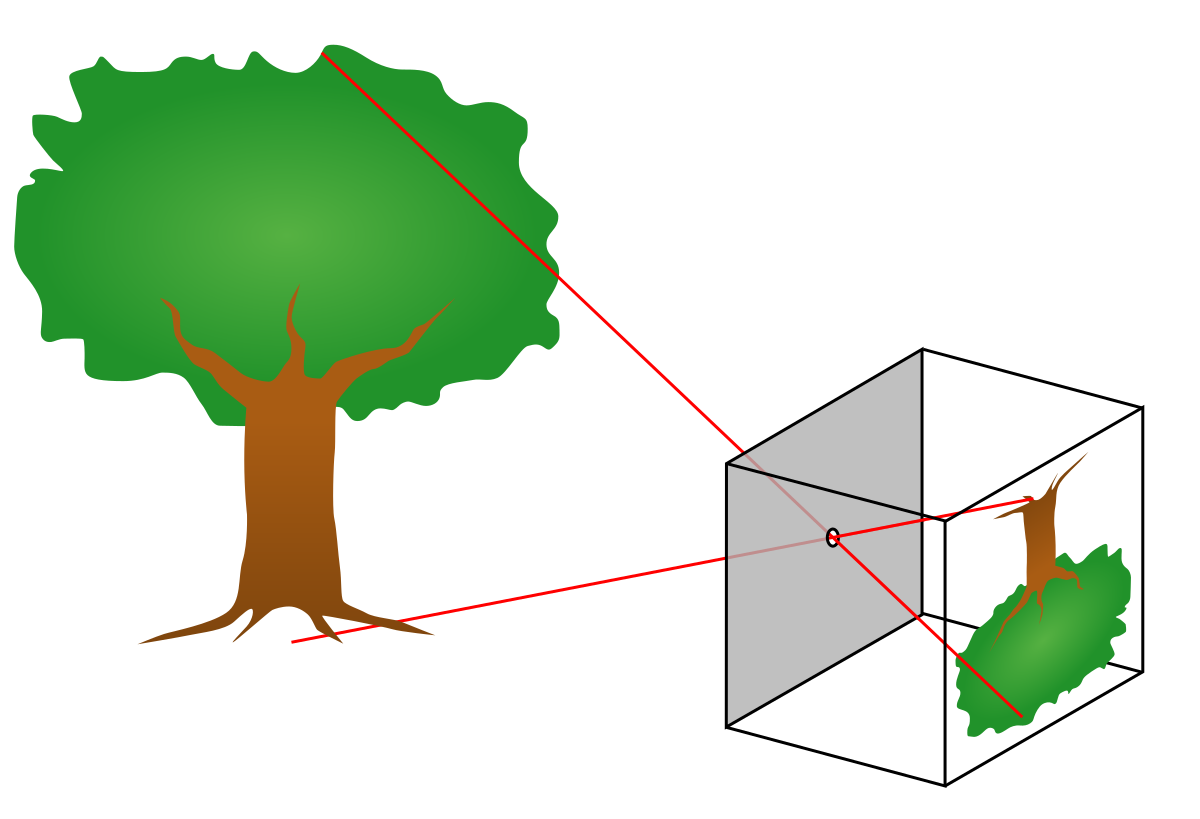
假设在一个空间中,只包含光源、树和感光白板三个物体。当光源发出的光打在的树上时,会发生漫反射现象。即,反射光线会以树上任一点为球心射向所有方向。
此时如果只是简单地在树的前方放置一个感光白板,以白板上的任意一个点A为研究对象,该点将收到来自树上所有反射点的反射光线。这些光线叠加在一起,将使得感光点A无法专一地只体现某一个反射点的特征。宏观来看,感光白板上无法产生任何关于这棵树的有效视觉信息。
如果在树和感光白板之间加一个针孔板,那么感光点A的光线来源就只有树上的一个反射点了,并且反射点-针孔-感光点三点成一线。这样,宏观来看,感光白板上便产生了一棵树。
相机坐标系
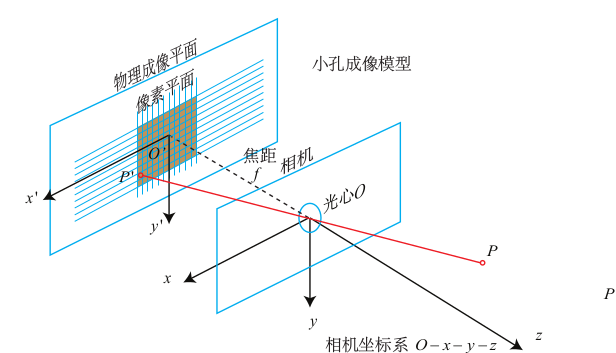
盘点上述成像过程中涉及的坐标系,一般有以下4个:
- 世界坐标系,以相机所在的物理世界中的某个点为坐标原点(比如车辆的后轴中心),其中一点记作$(X_w,Y_w,Z_w)^T$;
- 相机坐标系,以光心(针孔)为坐标原点,其中一点记作$(X_c,Y_c,Z_c)^T$;
- 图像物理坐标系,以光心在感光板上的对应位置为坐标原点,其中一点记作$(x,y)^T$;
- 图像像素坐标系,一般以图像的左上角为坐标原点,其中一点记作$(u,v)^T$,并且单位不再是长度,而是像素个数;
坐标系转换关系
鉴于“反射点-针孔-感光点三点一线”的几何特征,给定一个世界坐标系中的点$(X_w,Y_w,Z_w)^T$,是可以求得该点在图像像素坐标系中的坐标的。
1.世界坐标系-相机坐标系
两个坐标系之间是简单地旋转和平移关系,因此有:
可以看到,式中的转换参数与相机本身的属性并无关系,因此一般将该矩阵称作相机的外参。
2.相机坐标系-图像物理坐标系
从相机坐标系到图像物理坐标系的转换关键点在于,这是一个3D-2D的转换,并且存在一个由相似三角形产生的缩放关系。因此有:
其中f为相机焦距,可以看到,这个转换是不可逆的,因此我们称单目相机损失了深度信息。
3.图像物理坐标系-图像像素坐标系
这是一个2D-2D的转换,而且在同一个平面上,只是坐标原点和坐标的单位需要转换。因此有:
其中,在x方向上,每个像素的尺寸为$d_x$毫米;$u_0$指光心在从左数第$u_0$个像素上。
4.汇总
综合来看,先将2和3结合,得到:
其中$\boldsymbol{K}$中的参数只跟相机属性相关,称作相机的内参,是一个3x3的矩阵。
然后,再加上1中的外参,得到:
其中$\boldsymbol{E}$为相机外参,是一个3x4矩阵。
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!